
前回はジャイロ式照準器が誕生に至るまでと、その基礎原理を解説しました。今回はこの照準器が、なぜ敵機が複雑な旋回を繰り返す実際の空戦でも役に立つことができたのか、についてもう少し詳しくみていきます。
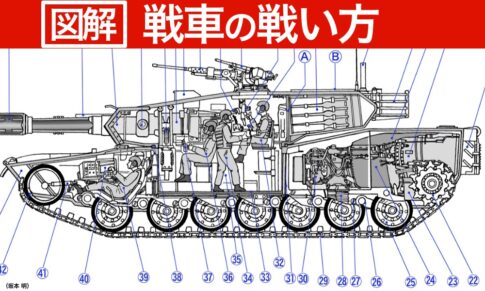
また後半では、アメリカ陸軍のK-14ジャイロ式照準器を例に挙げて、各パーツやその役割について解説していきます。
果たしてジャイロ式照準器は実戦で使えるのか?
前回は、弾丸が高速飛行する敵機に到達するまでに生じる偏差を読み取るジャイロ式照準器(Gyro computing gun sight)の原理を説明しました。これはジャイロスコープを搭載した照準器であり、おさらいをするとその基本的な考え方は次の[図1]のようなものでした。
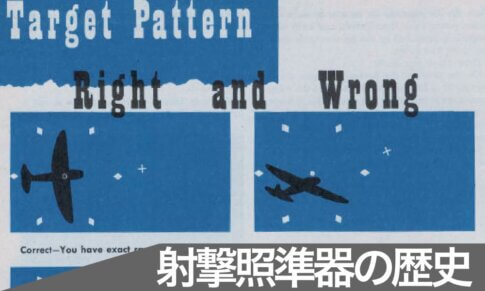
ここでそもそもジャイロ式照準器がどのようなものかを知らない人に、イギリス空軍のジャイロ式照準器の実例をお見せすると[図2]のようになります。

非常に大雑把にいえば、左下のレティクルに敵機を収めることができれば、自動的に中央の丸の位置で敵機に命中させることができる。DEFLECTIONとは偏差のこと(Image:Public Domain/画像クリックでYouTube「AWM Collection」の動画へ移動)
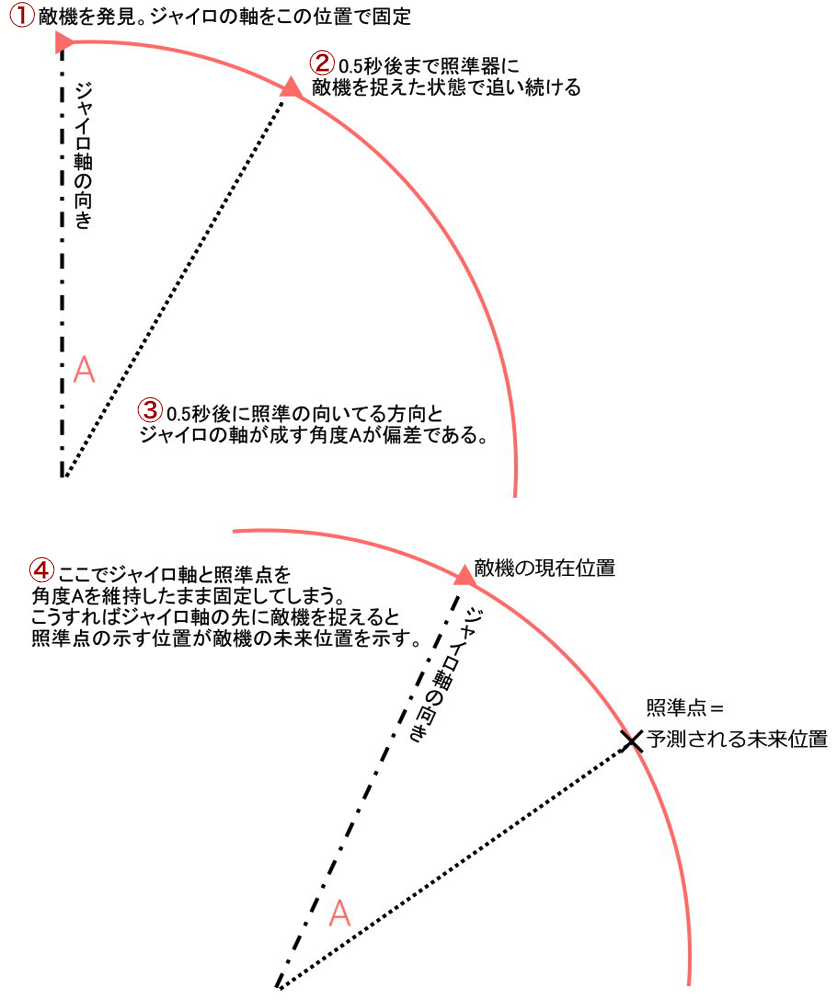
しかし、「自機は固定された銃座で、敵の旋回半径の中心点にいる」という前提はあまりに非現実的であり、そんな原理が果たして実戦で役に立つのか? という疑問が残ります。そこで、戦闘機による追尾戦でも、基本的にはこの原理が成立することをここで確認しておきます。
前提条件は「直線飛行で追尾中、敵機が正円の旋回に入った状態」です。より実戦的な追尾曲線、あるいは角速度1が変化する旋回2に対しても応用が効くので、この原理を理解すれば十分だと思ってください。
(編集部注:ここで「角速度が変化する旋回に対しても応用が効く」と考えられる根拠は、短時間で見た場合、正円の一部と見なせるからです。つまり、何度も切り返す旋回機動や正円旋回も、0.5〜数秒程度の部分だけ切り取れば同じだからです)










コメントを残す