2020年夏、人工知能(AI)がドッグファイト・シミュレーションにて人間パイロットに勝利したことが話題になったが、現在の無人戦闘機がどのくらいの実用レベルになってきているのか、また、どのような方向性での研究が行なわれているのかを紹介していく。
自律型無人機の実用レベルはどれほどか
人間が遠隔操作で無人機を操縦する場合、たとえ通信が妨害されなくても、現在ではまだ問題がある。
非常に高い運動性をもつ敵の有人戦闘機に対して、ドッグファイトを行なうのは遠隔操作無人機では適切ではない。なぜなら視界などの状況認識能力や、別の場所から無人機を操縦しているオペレーターの反応時間が十分でないからだ。現状、遠隔操縦の無人機は通信の遅延が発生する。
戦闘機同士のドッグファイトでは、時にコンマ数秒の差が勝敗に大きな影響をもたらす。現場の戦場にいて有人機に乗っているパイロットの反応速度は、平均で0.2秒程度である。

現在のところ、遠距離からの遠隔操縦無人機で、このような反応速度を再現するのはまず不可能である。反応速度の遅延は、対有人機の空対空戦において遠隔操縦無人機が圧倒的に不利になることを意味している。
また、地上から遠隔操作している操縦員がリアルタイムで状況認識を行なうためには、非常に高いデータ転送速度が必要になる。特に高解像度の動画を送信するには高いデータレート(≒帯域幅)が必要になる。この場合、通信信号の一部でも失われれば、脅威度の高い(競争環境)戦場にいる遠隔操縦無人機に破滅的な結果がもたらされるかもしれない。
なぜ無人機の反応は遅延するのか?
無人航空機の反応の遅延は、複数の理由によって発生する。人間が操作システムへ入力することによる遅延や、データリンクによる遅延、デジタル処理による遅延などである。しかし、「無人機自体の反応速度の遅延」に比べれば、「データリンクによる遅延」のほうがはるかに大きい。
例えば、RQ-4グローバルホークの場合、見通し内通信のデータリンクでは、片道でだいたい1から3秒の遅延が発生する。衛星(UHF SATCOM)による見通し外通信のデータリンクでは、片道で2から4秒の遅延がでる。往復では、その倍近くの遅延が発生しうる。

[RQ-4B]全長 14.5m、翼幅 14.5m、高さ 4.7m、自重 6,781kg、最大重量 14,628kg、最高速度 629km/h、巡航速度 570km/h、航続距離 22,780km、滞空時間 32〜h、実用上昇限度 18,000m
なお、MQ-1プレデターやMQ-9リーパーとRQ-4では、制御に異なったアプローチが採用されている。MQ-1やMQ-9では「man-in-the-loop1」が採用されており、オペレーターは注意深く無人機をモニタリングしたりシステムを制御しなくてはならない。これらの機種は、非常に遠い距離で操縦するラジコン飛行機に似ている。

[MQ-1B]全長 8.23m、翼幅 14.8m、高さ 2.1m、自重 513kg、最大重量 1,020kg、最高速度 217km/h、巡航速度 170km/h、航続距離 1,250km、滞空時間 24h、実用上昇限度 7,600m

[MQ-9A]全長 11m、翼幅 20m、高さ 3.81m、自重 2,223kg、最大重量 4,760kg、最高速度 482km/h、巡航速度 313km/h、航続距離 1,900km、滞空時間 14h、運用高度 7,500m
一方、RQ-4では「man-on-the-loop2」が採用されており、広く自動化されている。RQ-4の場合、任務を行なうための人間の介入は最小限である。
RQ-4のような遠隔操縦無人機システムでは、離れた場所にいる地上のオペレーターは直接には機体を操縦してはおらず、無人飛行機はオートパイロットで飛行している。機体に異なった動きをさせるときにも、オペレーターが直接操縦をするのではなく、間接的に自動制御を解除(オーバーライド)し、再プログラミングや現在のミッションデーターの修正を行なわなければならない。
例えば、高度を変えるといったような単純な変更では、パラメーターを再プログラミングするのに3から5秒が必要になる。進行方向や飛行経路のような複雑な変更では、オートパイロットやミッションデータを更新するのに、10秒からそれ以上かかる可能性がある。
ランド研究所のレポート3では、次のように書かれている。
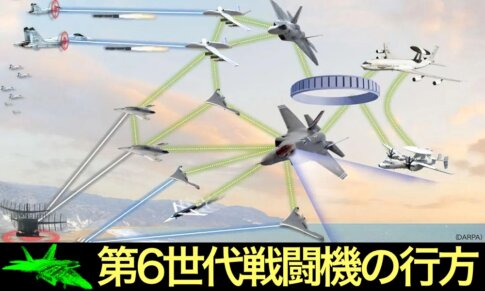
「無人機は、敵の運動性の低い爆撃機やISR(情報収集・警戒監視・偵察)機のような高価値航空目標を攻撃するのに適しているかもしれない。しかし、このような目標は、おそらく戦闘機によって守られている」「(空対空戦闘で)最適な選択は、空対空能力を持った無人機が、有人機含むより大きな編隊の一部となることだ。おそらくF-35は無人機を戦場に導き、無人機の兵器を誘導できるだろう。要するに、無人機は単純に有人機により多くの兵器を提供することができる」
加えて、通信が妨害され遠隔操縦が不可能になれば、このタイプの無人機は無力になる。特に送信側と受信側の距離が遠い通信は妨害されやすい。
脚注
- man-in-the-loop……機械(無人機)が特定の行動を起こすときに、その都度必ず人間の許可が必要になるシステムのこと。現在、無人兵器が致死性の攻撃をするときは、この方式でなければならないとされている(その都度、人間が許可しないかぎり、無人機は特定の行動をしない) 。
- man-on-the-loop……機械(無人機)は自動で行動するが、それを人間が監視していて、何かあれば、いつでも人間が介入して特定の行動を止めさせることができるシステムのこと(人間が介入しなければ、無人システムは自動で行動しつづける)。ちなみに人間が介入することができず、完全に自律した無人システムは「man-out-of-the-loop」である。
- Brien Alkire, et al., "Applications for Navy Unmanned Aircraft Systems", Rand Corporation,2010









差し当たり有人戦闘機の方が有利なようですが、将来、間違いなく無人戦闘機の性能は向上すると思いますが、もし有人戦闘機のパイロットが相手にするのは無人戦闘機だけとなったったら、パイロットはやる気をなくしませんか?